Road to Generative AI - Part 3: A deep dive into model initialization
19 Aug 2025
Reading time ~30 minutes
Table of Contents
- Data Loading and Cleanup
- Data Cleaning
- Modeling Datasets
- Understanding the Initialization Problem
- Initial Loss Fix
- Hidden Layer Initialization
- Information Variance Growth
- Batch Normalization
- PyTorch Implementation
Introduction
In this third installment of our series on building neural networks from scratch, we explore a critical yet often overlooked aspect of deep learning: weight initialization. While the previous parts focused on building basic text generation models, here we investigate how proper initialization strategies can dramatically improve training stability and convergence.
The purpose of this notebook is to dive deeper into the initialization of neural network models. In the first part of this series, we explored the concept of Generative AI and built a simple model that generates text using a bigram model and a single-layer neural network (NN). In the second part, we built a more complex model using a Multi-Layer Perceptron (MLP) to generate text.
In this study, we cover the following concepts:
- Output layer initialization
- Input layer normalization
- Batch normalization
- Data visualization techniques to understand the behavior of the model
Understanding the Initialization Problem
Before diving into the technical implementation, let’s understand why weight initialization is crucial for neural network training. Poor initialization can lead to several critical issues:
- Vanishing Gradients: When weights are too small, activations become tiny, making gradients nearly zero and preventing learning.
- Exploding Gradients: When weights are too large, activations become massive, causing training instability and numerical overflow.
- Dead Neurons: Neurons that never activate due to poor initialization, effectively reducing your model’s capacity.
- Poor Convergence: Models that take much longer to train or never reach optimal performance due to fighting against bad initialization.
import matplotlib.pyplot as plt
import random
import torch
import torch.nn.functional as F
from unidecode import unidecode
DATASET_PATH = "./datasets/birds/birds.csv"
birds = open(DATASET_PATH, "r").read().splitlines()
print("First 10 birds in the dataset:\n")
print(", ".join(birds[:10]))
print(f"There are {len(birds):,d} birds in the dataset.")
min_length = map(len, birds)
max_length = map(len, birds)
print(f"\nThe shortest character name has {min(min_length)} characters.")
print(f"The longest character name has {max(max_length)} characters.")
First 10 birds in the dataset:
Abbott's babbler, Abbott's booby, Abbott's starling, Abbott's sunbird, Abd al-Kuri sparrow, Abdim's stork, Aberdare cisticola, Aberrant bush warbler, Abert's towhee, Abyssinian catbird
There are 10,976 birds in the dataset.
The shortest character name has 3 characters.
The longest character name has 35 characters.
Data Cleaning
Before we can use the bird names for training our neural network, we need to clean and standardize the data. Raw text data often contains inconsistencies that can make training more difficult, so we’ll apply several preprocessing steps to ensure our dataset is uniform and ready for tokenization.
The cleaning process we’ll implement includes:
- Whitespace normalization: Removing leading and trailing spaces
- Case standardization: Converting all text to lowercase for consistency
- Character filtering: Removing accents and special characters that might complicate tokenization
- Space handling: Replacing spaces with underscores to create valid single tokens
- Tokenization mapping: Creating bidirectional mappings between characters and numerical indices
This preprocessing step is crucial for ensuring our model receives clean, consistent input data that will lead to better training results.
from unidecode import unidecode
def clean_name(name):
"""
Clean the bird name by:
- Removing leading and trailing whitespaces
- Converting to lowercase
- Removing accents
- Removing special characters
- Replacing spaces with underscores
"""
name = name.strip().lower()
# replace special characters with a space
name = ''.join(char if char.isalnum() or char.isspace() else ' ' for char in name)
name = name.replace("`", "_") # Remove apostrophes
name = name.replace(" ", "_")
name = unidecode(name)
return name
# clean all names in the dataset
birds = list(map(clean_name, birds))
# create a mapping from tokens to indices
unique_tokens = set([c for w in birds for c in w])
SPECIAL_TOKEN = "."
index_to_token = {i: t for i, t in enumerate(unique_tokens, start=1)}
token_to_index = {v: k for k, v in index_to_token.items()}
index_to_token[0] = SPECIAL_TOKEN
token_to_index[SPECIAL_TOKEN] = 0
# log information about the tokenization
print(f"Number of unique tokens: {len(unique_tokens)}")
print(", ".join(sorted(unique_tokens)))
print(f"\nToken mapping: {index_to_token}")
Number of unique tokens: 28
_, `, a, b, c, d, e, f, g, h, i, j, k, l, m, n, o, p, q, r, s, t, u, v, w, x, y, z
Token mapping: {1: 'm', 2: 'l', 3: 'r', 4: 'n', 5: '`', 6: 'k', 7: 'o', 8: 'g', 9: 'c', 10: 'v', 11: 'j', 12: 'u', 13: 's', 14: 'a', 15: 'i', 16: 'e', 17: 'w', 18: 'q', 19: '_', 20: 'b', 21: 'h', 22: 'y', 23: 't', 24: 'z', 25: 'p', 26: 'x', 27: 'f', 28: 'd', 0: '.'}
Modeling Datasets
In this section, we divide the dataset into training, validation, and test sets. We will use the validation set to tune the model and the test set to evaluate the model.
We will use 80% of the data for training, 10% for validation, and 10% for testing.
# Model parameters
CONTEXT_SIZE = 3
N_EMBEDDINGS = 10
N_HIDDEN = 200
# Training parameters
TRAINING_SET_PORTION = 0.8
DEVELOPMENT_SET_PORTION = 0.1
TEST_SET_PORTION = 1 - (TRAINING_SET_PORTION + DEVELOPMENT_SET_PORTION)
def build_datasets(words: list[str]) -> tuple[torch.Tensor, torch.Tensor]:
"""
Build datasets from a list of words by creating input and target tensors.
Args:
words (list[str]): List of words to build the datasets from.
Returns:
tuple[torch.Tensor, torch.Tensor]: Tuple containing the input tensor X and target tensor Y.
"""
# Create a mapping from tokens to indices
X, Y = [], []
# Create the context for each character in the words
for w in words:
context = [0] * CONTEXT_SIZE
for ch in w + SPECIAL_TOKEN: # Add special token at the end
ix = token_to_index[ch]
X.append(context)
Y.append(ix)
# Update the context by shifting it and adding the new index
context = context[1:] + [ix]
# Convert lists to tensors
X = torch.tensor(X, dtype=torch.int64)
Y = torch.tensor(Y, dtype=torch.int64)
return X, Y
# Shuffle the words
random.seed(1234)
random.shuffle(birds)
# Split the dataset into training, development, and test sets
train_size = int(TRAINING_SET_PORTION * len(birds))
dev_size = int(DEVELOPMENT_SET_PORTION * len(birds))
X_train, Y_train = build_datasets(birds[:train_size])
X_dev, Y_dev = build_datasets(birds[train_size:train_size + dev_size])
X_test, Y_test = build_datasets(birds[train_size + dev_size:])
# print tensor shapes
print("Training set shape:", X_train.shape, Y_train.shape)
print("Development set shape:", X_dev.shape, Y_dev.shape)
print("Test set shape:", X_test.shape, Y_test.shape)
Training set shape: torch.Size([172513, 3]) torch.Size([172513])
Development set shape: torch.Size([21531, 3]) torch.Size([21531])
Test set shape: torch.Size([21461, 3]) torch.Size([21461])
Optimizing the initialization of the model
The following code defines a simple feed-forward neural network model. It consists of an embedding layer, a hidden layer, and an output layer.
Throughout this notebook, we investigate the effects of different initialization strategies. This function allows for several approaches to be tested by adjusting the W_scale and b_scale parameters.
- Reduce the variance of the weights and biases to avoid a very opinionated initial softmax function.
- Reduce the variance of the weights and biases to avoid saturation of the tanh function.
Create Model Architecture
We start with a simple initialization using a normal distribution.
def create_model(embedding_dim, context_size, layer_size, n_token,
W1_scale: float = 1.0, b1_scale: float = 1.0,
W2_scale: float = 1.0, b2_scale: float = 1.0):
"""
Create a simple feedforward neural network model.
This model consists of an embedding layer, a hidden layer, and an output layer.
Args:
-- Model architecture --
embedding_dim (int): Dimension of the embedding layer.
context_size (int): Size of the context window.
layer_size (int): Size of the hidden layer.
n_token (int): Number of unique tokens in the vocabulary.
-- Normalization parameters --
W1_scale (float): Scale factor for the weights of the first layer. Default is 1.0.
b1_scale (float): Scale factor for the biases of the first layer. Default is 1.0.
W2_scale (float): Scale factor for the weights of the second layer. Default is 1.0.
b2_scale (float): Scale factor for the biases of the second layer. Default is 1.0.
Returns:
list[torch.Tensor]: List of model parameters including embeddings, weights, and biases.
- C (torch.Tensor): Embedding matrix of shape (n_token, embedding_dim).
- W1 (torch.Tensor): Weights for the first layer of shape (embedding_dim * context_size, layer_size).
- b1 (torch.Tensor): Bias for the first layer of shape (layer_size,).
- W2 (torch.Tensor): Weights for the second layer of shape (layer_size, n_token).
- b2 (torch.Tensor): Bias for the second layer of shape (n_token,).
- bngain (torch.Tensor): Gain for batch normalization of shape (1, layer_size).
- bnbias (torch.Tensor): Bias for batch normalization of shape (1, layer_size).
"""
g = torch.Generator().manual_seed(1234)
# Embedding matrix
C = torch.randn((n_token, embedding_dim), dtype=torch.float32, generator=g) # shape (28, 10)
# Hidden layer
W1 = torch.randn((embedding_dim * context_size, layer_size), dtype=torch.float32, generator=g) * W1_scale # shape (30, 128)
b1 = torch.randn((layer_size,), dtype=torch.float32, generator=g) * b1_scale # shape (128,)
# Output layer
W2 = torch.randn((layer_size, n_token), dtype=torch.float32, generator=g) * W2_scale # shape (128, 28)
b2 = torch.randn((n_token,), dtype=torch.float32, generator=g) * b2_scale # shape (28,)
# Batch normalization parameters
bngain = torch.ones((1, layer_size), dtype=torch.float32) # Gain for batch normalization
bnbias = torch.zeros((1, layer_size), dtype=torch.float32)
bnmean_running = torch.zeros((1, layer_size), dtype=torch.float32) # Running mean for batch normalization
bnstd_running = torch.ones((1, layer_size), dtype=torch.float32) # Running std for batch normalization
params = [C, W1, b1, W2, b2, bngain, bnbias]
print(f"The model has {sum(p.nelement() for p in params):,d} parameters.")
for p in params:
p.requires_grad = True # Set requires_grad to True to enable backpropagation
# Add batch normalization parameters
params += [bnmean_running, bnstd_running]
return params
Training Parameters
# Training parameters
MAX_STEPS = 200_000
BATCH_SIZE = 32
INITIAL_LEARNING_RATE = 0.1
LEARNING_RATE_DECAY = 0.1
Model Training
def forward(params, X, use_batch_norm: bool = False):
"""
Forward pass through the
neural network model.
Args:
params (list[torch.Tensor]): List of model parameters including embeddings, weights, and biases.
X (torch.Tensor): Input tensor of shape (BATCH_SIZE, CONTEXT_SIZE).
use_batch_norm (bool): If True, applies batch normalization to the hidden layer activations.
Returns:
torch.Tensor: Output tensor of shape (BATCH_SIZE, n_token) representing the logits.
"""
# Unpack parameters for easier access
C, W1, b1, W2, b2, bngain, bnbias, bnmean_running, bnstd_running = params
# Forward pass
with torch.no_grad():
emb = C[X] # shape (BATCH_SIZE, CONTEXT_SIZE, N_EMBEDDINGS)
embcat = emb.view(emb.shape[0], -1) # concatenate the vectors
hpreact = embcat @ W1 + b1 # shape (BATCH_SIZE, LAYER_SIZE)
if use_batch_norm:
hpreact = (hpreact - bnmean_running) / bnstd_running # Batch normalization
# Apply gain and bias
hpreact = bngain * hpreact + bnbias # shape (BATCH_SIZE, LAYER_SIZE)
h = torch.tanh(hpreact) # shape (BATCH_SIZE, LAYER_SIZE)
logits = h @ W2 + b2 # shape (BATCH_SIZE, n_token)
return logits
def train_model(params, X_train, Y_train, X_dev=None, Y_dev=None, break_after_1_step=False, use_batch_norm: bool = False):
"""
Train the model using the provided parameters and training data.
Args:
params (list[torch.Tensor]): List of model parameters including embeddings, weights, and biases.
X_train (torch.Tensor): Input tensor for training.
Y_train (torch.Tensor): Target tensor for training.
X_dev (torch.Tensor, optional): Input tensor for development set. Defaults to None.
Y_dev (torch.Tensor, optional): Target tensor for development set. Defaults to None.
break_after_1_step (bool, optional): If True, breaks after one training step
use_batch_norm (bool, optional): If True, applies batch normalization. Defaults to False.
Returns:
lossi (list[float]): List of loss values recorded during training.
h (Tensor): Hidden layer activations after the last forward pass.
"""
# Unpack parameters for easier access
C, W1, b1, W2, b2, bngain, bnbias, bnmean_running, bnstd_running = params
# Create a generator for reproducibility
g = torch.Generator().manual_seed(1234)
lossi = []
n_steps = MAX_STEPS
for i in range(n_steps):
# Minibatch index
ix = torch.randint(0, X_train.shape[0], (BATCH_SIZE,), generator=g) # Randomly sample BATCH_SIZE indices, shape (BATCH_SIZE,)
Xb, Yb = X_train[ix], Y_train[ix] # Get the corresponding input and target tensors
# Forward pass
emb = C[Xb] # shape (BATCH_SIZE, CONTEXT_SIZE, N_EMBEDDINGS)
embcat = emb.view(emb.shape[0], -1) # concatenate the vectors
# Linear layer
hpreact = embcat @ W1 + b1 # shape (BATCH_SIZE, LAYER_SIZE)
# Batch normalization
if use_batch_norm:
bnmean_i = hpreact.mean(dim=0, keepdim=True).mean() # Mean for batch normalization
bnstd_i = hpreact.std(dim=0, keepdim=True) # Std for batch normalization
hpreact = (hpreact - bnmean_i) / bnstd_i # Batch normalization
# Apply gain and bias
hpreact = bngain * hpreact + bnbias # shape (BATCH_SIZE, LAYER_SIZE)
# Update running statistics for batch normalization
with torch.no_grad():
bnmean_running = bnmean_running * 0.999 + bnmean_i * 0.001
bnstd_running = bnstd_running * 0.999 + bnstd_i * 0.001
# Activation function
h = torch.tanh(hpreact) # shape (BATCH_SIZE, LAYER_SIZE)
# Output layer
logits = h @ W2 + b2 # shape (BATCH_SIZE, n_token)
loss = F.cross_entropy(logits, Yb) # compute the cross-entropy loss
# Backward pass
for p in params:
p.grad = None # Reset gradients to zero before backpropagation
loss.backward() # Compute gradients
# Update parameters using gradient descent
lr = INITIAL_LEARNING_RATE if i < 100_000 else INITIAL_LEARNING_RATE * LEARNING_RATE_DECAY
for p in params:
if p.grad is not None:
p.data -= lr * p.grad
# Logging
if i % 10_000 == 0:
print(f"{i:8,d}/{n_steps:8,d} | Loss: {loss.item():.4f} | Learning Rate: {lr:.6f}")
lossi.append(loss.log10().item())
if break_after_1_step and i == 0:
print("Breaking after one step as requested.")
break
if X_dev is not None and Y_dev is not None:
# Evaluate on the development set
with torch.no_grad():
dev_logits = forward(params, X_dev)
dev_loss = F.cross_entropy(dev_logits, Y_dev)
print(f"Development Loss: {dev_loss.item():.4f}")
return lossi, h
We create a model with random initialization of the embeddings, weights, and biases. After a single batch, we stop the training and measure the loss.
# Create the model without any normalization
params = create_model(N_EMBEDDINGS, CONTEXT_SIZE, N_HIDDEN, len(token_to_index))
# Train the model
lossi, h = train_model(params, X_train, Y_train, X_dev=None, Y_dev=None, break_after_1_step=True)
The model has 12,719 parameters.
0/ 200,000 | Loss: 23.4012 | Learning Rate: 0.100000
Breaking after one step as requested.
Initial Loss Fix
We see that the initial loss is very high and much higher than a random guess. In fact, a model choosing a random token would have a loss of \(\log(\frac{1}{V})\), where \(V\) is the vocabulary size. This is because the model would be equally likely to choose any token from the vocabulary, leading to a uniform distribution over the output logits.
expected_probability = 1 / len(token_to_index)
expected_loss = -torch.log(torch.tensor(expected_probability))
print(f"Expected probability for a random guess: {expected_probability:.4f}")
print(f"Expected loss for a random guess: {expected_loss.item():.4f}")
Expected probability for a random guess: 0.0345
Expected loss for a random guess: 3.3673
By reducing the amplitude of the weights of the output layer, we can reduce the initial loss. Even though this approach leaves room for trial and error to find the best initialization, it is a good starting point.
# Create the model and reduce the amplitude of the output layer
params = create_model(N_EMBEDDINGS, CONTEXT_SIZE, N_HIDDEN, len(token_to_index), W2_scale=0.1, b2_scale=0.0)
# Train the model
lossi, h = train_model(params, X_train, Y_train, X_dev=None, Y_dev=None, break_after_1_step=True)
The model has 12,719 parameters.
0/ 200,000 | Loss: 3.9139 | Learning Rate: 0.100000
Breaking after one step as requested.
Hidden Layer Initialization
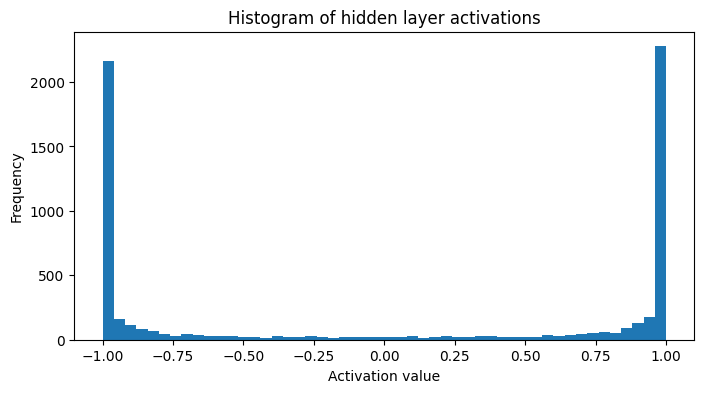
Having most of the neurons take values close to -1 and 1 affects the gradient of the tanh function. Since \(\frac{d}{dx} \tanh(x) = 1 - \tanh^2(x)\), the gradient takes values close to 0 when the input is large, which leads to vanishing gradients. This is why, initially, we do not want the values flowing through the network to be too large. As shown in the plot below, a large majority of the output values of the first layer are close to -1 or 1, which is not ideal for training.
fig, ax = plt.subplots(figsize=(8, 4))
plt.hist(h.view(-1).tolist(), 50)
plt.title("Histogram of hidden layer activations")
plt.xlabel("Activation value")
plt.ylabel("Frequency")
plt.show();
Understanding the Vanishing Gradient Problem: When a neuron’s activation is close to ±1 (saturated), the derivative of the tanh function approaches zero. This creates a “vanishing gradient” where:
- Saturated neurons have gradients near zero
- Backpropagation becomes ineffective through these neurons
- Learning slows down dramatically or stops entirely
- Deep layers are particularly affected, as gradients compound
Mathematical Intuition:
For tanh activation: \(f(x) = \tanh(x)\)
- When \(x\) is large: \(\tanh(x) \approx \pm 1\)
- Derivative: \(f'(x) = 1 - \tanh^2(x) \approx 0\)
- Result: No gradient flow, no learning
Another aspect to consider is the possibility of dead neurons in the network. A dead neuron is a neuron that outputs a constant value, which means it does not contribute to the learning process. This can happen if the weights are initialized in such a way that the neuron never activates. Below, we plot the output values of the first layer on the last batch.
plt.figure(figsize=(12, 4))
plt.imshow(h.abs()>0.99, aspect='auto', cmap='gray')
plt.title("Hidden layer activations (absolute values > 0.99)")
plt.xlabel("Neuron index")
plt.ylabel("Batch index")
plt.colorbar(label="Activation > 0.99")
plt.show();
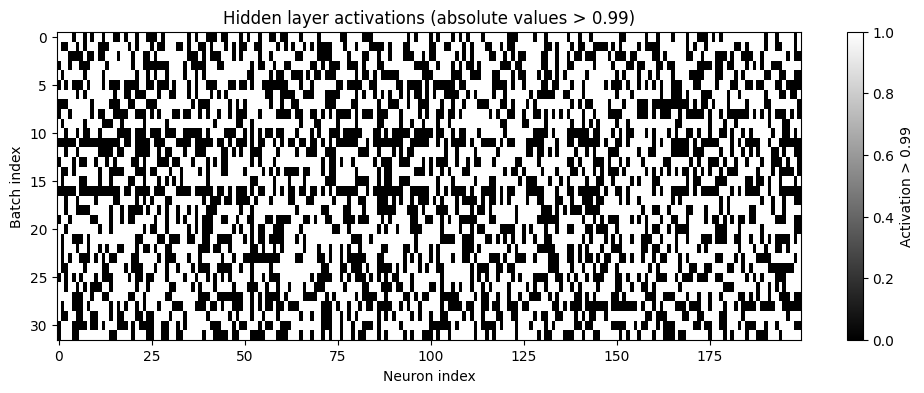
We can look for any dead neurons in the hidden layer by checking if any of the activations are zero across all batches. If a neuron is dead, it means it does not contribute to the output and can be removed from the model.
neuron_values = h.sum(dim=0).abs()
print(f"Minimum absolute neuron activation value: {neuron_values.min().item():.4f}")
print(f"Maximum absolute neuron activation value: {neuron_values.max().item():.4f}")
Minimum absolute neuron activation value: 0.0031
Maximum absolute neuron activation value: 25.0589
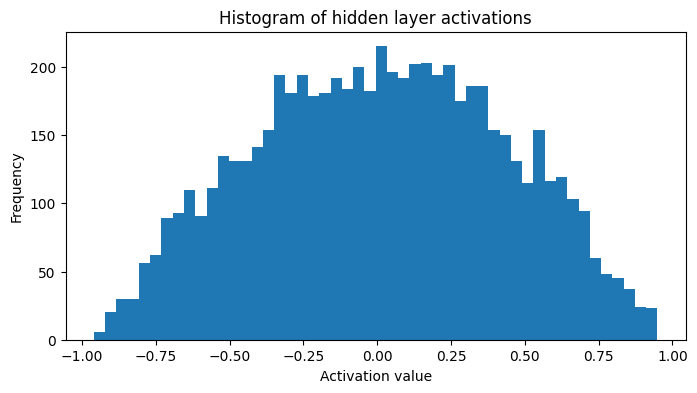
If we now reduce the variance of the weights and biases, we can see that the initial loss is much lower and the hidden layer activations are more balanced. This leads to a better training process as the gradients are more stable and the model can learn more effectively.
# Create the model and reduce the amplitude of the output layer and the hidden layer
params = create_model(N_EMBEDDINGS, CONTEXT_SIZE, N_HIDDEN, len(token_to_index), W2_scale=0.1, b2_scale=0.0, W1_scale=0.1, b1_scale=0.0)
# Train the model
lossi, h = train_model(params, X_train, Y_train, X_dev=None, Y_dev=None, break_after_1_step=True)
The model has 12,719 parameters.
0/ 200,000 | Loss: 3.4889 | Learning Rate: 0.100000
Breaking after one step as requested.
The plot below shows the hidden layer activations after reducing the variance of the weights and biases. We can see that the activations are more balanced, with fewer neurons taking extreme values close to -1 or 1 and the majority of the neurons taking values ranging from -0.5 to 0.5.
g = torch.Generator().manual_seed(56789)
class Linear:
def __init__(self, fan_in, fan_out, bias=True, generator=g):
self.weight = torch.randn(fan_in, fan_out, generator=generator) / fan_in ** 0.5
self.bias = torch.zeros(fan_out) if bias else None
def __call__(self, x):
self.out = x @ self.weight
if self.bias is not None:
self.out += self.bias
return self.out
def parameters(self):
return [self.weight] + ([] if self.bias is None else [self.bias])
class BatchNorm1d:
def __init__(self, dim, eps=1e-5, momentum=0.1):
self.momentum = momentum
self.eps = eps
self.training = True
# parameters trained with backprop
self.gamma = torch.ones(dim)
self.beta = torch.zeros(dim)
# buffers trained with momentum
self.running_mean = torch.zeros(dim)
self.running_var = torch.ones(dim)
def __call__(self, x):
if self.training:
xmean = x.mean(0, keepdim=True) # shape (1, dim)
xvar = x.var(0, keepdim=True, unbiased=True) # shape (1, dim)
else:
xmean = self.running_mean
xvar = self.running_var
xhat = (x - xmean) / torch.sqrt(xvar + self.eps)
self.out = self.gamma * xhat + self.beta
if self.training:
with torch.no_grad():
self.running_mean = (1 - self.momentum) * self.running_mean + self.momentum * xmean
self.running_var = (1 - self.momentum) * self.running_var + self.momentum * xvar
return self.out
def parameters(self):
return [self.gamma, self.beta]
class Tanh:
def __call__(self, x):
self.out = torch.tanh(x)
return self.out
def parameters(self):
return []
n_emb = 10
n_hidden = 100
vocab_size = len(token_to_index)
# model initialization
C = torch.randn((vocab_size, n_emb), generator=g)
layers = [
Linear(n_emb * CONTEXT_SIZE, n_hidden), BatchNorm1d(n_hidden), Tanh(),
Linear(n_hidden, n_hidden), BatchNorm1d(n_hidden), Tanh(),
Linear(n_hidden, n_hidden), BatchNorm1d(n_hidden), Tanh(),
Linear(n_hidden, n_hidden), BatchNorm1d(n_hidden), Tanh(),
Linear(n_hidden, n_hidden), BatchNorm1d(n_hidden), Tanh(),
Linear(n_hidden, vocab_size)
]
with torch.no_grad():
# shrink confidence of last layer
layers[-1].weight *= 0.1
# apply tanh gain to other layers
for layer in layers[:-1]:
if isinstance(layer, Linear):
layer.weight *= 5/3
parameters = [C] + [p for layer in layers for p in layer.parameters()]
# display number of total parameters
print(f"Total number of parameters: {sum(p.nelement() for p in parameters):,}")
for p in parameters:
p.requires_grad = True
Total number of parameters: 47,719
fig, ax = plt.subplots(figsize=(8, 4))
plt.hist(h.view(-1).tolist(), 50)
plt.title("Histogram of hidden layer activations")
plt.xlabel("Activation value")
plt.ylabel("Frequency")
plt.show();
neuron_values = h.sum(dim=0).abs()
print(f"Minimum absolute neuron activation value: {neuron_values.min().item():.4f}")
print(f"Maximum absolute neuron activation value: {neuron_values.max().item():.4f}")
Minimum absolute neuron activation value: 0.0324
Maximum absolute neuron activation value: 9.9241
Information Variance Growth
When chaining linear layers, the variance of the output grows. This is because the output of each layer is a linear combination of the inputs, and if the weights are not properly scaled, the output can grow very large. This can lead to saturation of the activation functions, which in turn leads to vanishing gradients.
The Mathematical Foundation:
Consider a linear transformation \(y = Wx + b\) where:
- \(x \in \mathbb{R}^{n_{in}}\) with variance \(\text{Var}(x_i) = \sigma_x^2\)
- \(W \in \mathbb{R}^{n_{in} \times n_{out}}\) with weights \(W_{ij} \sim \mathcal{N}(0, \sigma_W^2)\)
- \(b \in \mathbb{R}^{n_{out}}\) with bias \(b_j = 0\) (for simplicity)
Variance Analysis:
For each output \(y_j\): \(y_j = \sum_{i=1}^{n_{in}} W_{ij} x_i\)
The variance of \(y_j\) becomes: \(\text{Var}(y_j) = \sum_{i=1}^{n_{in}} \text{Var}(W_{ij} x_i) = n_{in} \cdot \sigma_W^2 \cdot \sigma_x^2\)
The Problem: If \(\sigma_W^2 = 1\) (standard initialization), then \(\text{Var}(y_j) = n_{in} \cdot \sigma_x^2\)
This means the variance grows linearly with the number of inputs, potentially causing:
- Exploding activations in wide layers
- Saturation of activation functions
- Unstable training and poor convergence
The Solution - Xavier Initialization: To maintain \(\text{Var}(y_j) = \text{Var}(x_i)\), we need: \(\sigma_W^2 = \frac{1}{n_{in}}\)
This ensures that the variance remains constant across layers, preventing both vanishing and exploding gradients.
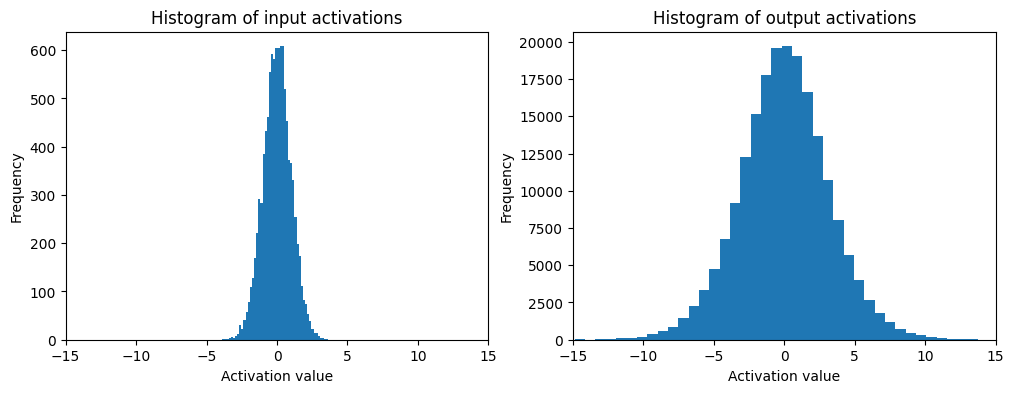
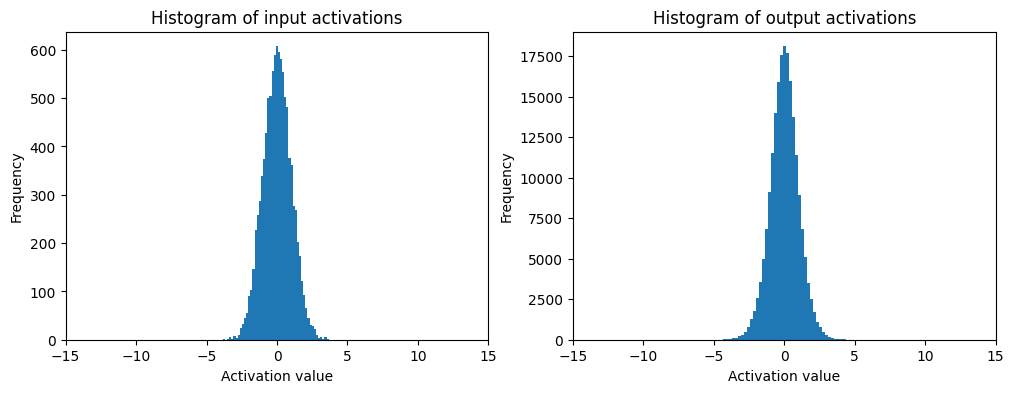
Below is a simple example using a single matrix multiplication. We can see that the variance of the output grows with the number of layers. This is why we need to scale the weights and biases properly to avoid this issue.
x = torch.randn(1000, 10)
w = torch.randn(10, 200)
y = x @ w # shape (1000, 200)
print(f"x mean = {x.mean().item():.4f}, std = {x.std().item():.4f}")
print(f"y mean = {y.mean().item():.4f}, std = {y.std().item():.4f}")
plt.figure(figsize=(12, 4))
plt.subplot(1, 2, 1)
plt.hist(x.view(-1).tolist(), 50)
plt.title("Histogram of input activations")
plt.xlabel("Activation value")
plt.ylabel("Frequency")
plt.xlim(-15, 15)
plt.subplot(1, 2, 2)
plt.hist(y.view(-1).tolist(), 50)
plt.title("Histogram of output activations")
plt.xlabel("Activation value")
plt.ylabel("Frequency")
# use same scale for the x-axis
plt.xlim(-15, 15)
plt.show();
x mean = 0.0059, std = 0.9911
y mean = -0.0067, std = 3.1721
The goal is then to initialize the weights and biases in such a way that the variance of the output is controlled. If we scale the weights by a factor of \(\frac{1}{\sqrt{n}}\), where \(n\) is the number of inputs to the layer, we can keep the variance of the output constant across layers. This is known as Xavier initialization or Glorot initialization.
x = torch.randn(1000, 10)
SCALING_FACTOR = (1 / x.shape[-1])**0.5
w = torch.randn(10, 200) * SCALING_FACTOR
y = x @ w # shape (1000, 200)
print(f"x mean = {x.mean().item():.4f}, std = {x.std().item():.4f}")
print(f"y mean = {y.mean().item():.4f}, std = {y.std().item():.4f}")
plt.figure(figsize=(12, 4))
plt.subplot(1, 2, 1)
plt.hist(x.view(-1).tolist(), 50)
plt.title("Histogram of input activations")
plt.xlabel("Activation value")
plt.ylabel("Frequency")
plt.xlim(-15, 15)
plt.subplot(1, 2, 2)
plt.hist(y.view(-1).tolist(), 50)
plt.title("Histogram of output activations")
plt.xlabel("Activation value")
plt.ylabel("Frequency")
# use same scale for the x-axis
plt.xlim(-15, 15)
plt.show();
x mean = 0.0073, std = 1.0007
y mean = 0.0019, std = 1.0068
Since we are using tanh() as the activation function, the normalization factor will be \(\frac{5/3}{\sqrt{n}}\) for the weights and 0 for the biases.
W1_scale = (5 / 3) / (N_EMBEDDINGS * CONTEXT_SIZE)**0.5
Batch Normalization
Batch normalization is a technique that normalizes the inputs to a layer by adjusting and scaling the activations. It helps to stabilize the learning process and can lead to faster convergence. The idea is to normalize the inputs to have zero mean and unit variance, which helps to mitigate the issues of vanishing gradients and exploding gradients.
Mathematical Formulation:
For a batch of activations \(x_1, x_2, \ldots, x_B\) where \(B\) is the batch size:
Step 1: Compute batch statistics \(\mu_B = \frac{1}{B} \sum_{i=1}^{B} x_i\) \(\sigma_B^2 = \frac{1}{B} \sum_{i=1}^{B} (x_i - \mu_B)^2\)
Step 2: Normalize the activations \(\hat{x}_i = \frac{x_i - \mu_B}{\sqrt{\sigma_B^2 + \epsilon}}\)
Step 3: Apply learnable parameters \(y_i = \gamma \hat{x}_i + \beta\)
Where \(\gamma\) (gain) and \(\beta\) (bias) are learnable parameters that allow the network to recover the optimal distribution if needed.
Key Benefits:
- Training Stability: Normalized inputs prevent activation saturation
- Higher Learning Rates: More stable gradients allow faster convergence
- Reduced Internal Covariate Shift: Each layer receives inputs with consistent statistics
- Regularization Effect: The noise introduced during training helps prevent overfitting
Important Considerations:
- Batch Dependency: Output depends on the batch it’s processed in
- Inference Mode: During prediction, we use running statistics instead of batch statistics
- Memory Overhead: Requires storing running mean and variance
- Computational Cost: Additional normalization step per layer
Running Statistics Update: During training, we maintain exponential moving averages: \(\mu_{running} \leftarrow (1 - \alpha) \mu_{running} + \alpha \mu_B\) \(\sigma^2_{running} \leftarrow (1 - \alpha) \sigma^2_{running} + \alpha \sigma^2_B\)
Where \(\alpha\) is the momentum parameter (typically 0.1).
In order for the output of the hidden layer to be normalized, we need to apply batch normalization. This is done by computing the mean and variance of the activations across the batch and then normalizing the activations using these statistics.
params = create_model(N_EMBEDDINGS, CONTEXT_SIZE, N_HIDDEN, len(token_to_index), W2_scale=0.1, b2_scale=0.0, W1_scale=0.1, b1_scale=0.0)
# Train the model
lossi, h = train_model(params, X_train, Y_train, X_dev=None, Y_dev=None, use_batch_norm=True)
The model has 12,719 parameters.
0/ 200,000 | Loss: 3.6222 | Learning Rate: 0.100000
10,000/ 200,000 | Loss: 1.6282 | Learning Rate: 0.100000
20,000/ 200,000 | Loss: 1.8343 | Learning Rate: 0.100000
30,000/ 200,000 | Loss: 2.1400 | Learning Rate: 0.100000
40,000/ 200,000 | Loss: 1.4409 | Learning Rate: 0.100000
50,000/ 200,000 | Loss: 1.8635 | Learning Rate: 0.100000
60,000/ 200,000 | Loss: 1.7364 | Learning Rate: 0.100000
70,000/ 200,000 | Loss: 1.4071 | Learning Rate: 0.100000
80,000/ 200,000 | Loss: 1.7045 | Learning Rate: 0.100000
90,000/ 200,000 | Loss: 1.2645 | Learning Rate: 0.100000
100,000/ 200,000 | Loss: 0.9600 | Learning Rate: 0.010000
110,000/ 200,000 | Loss: 1.5586 | Learning Rate: 0.010000
120,000/ 200,000 | Loss: 1.3129 | Learning Rate: 0.010000
130,000/ 200,000 | Loss: 1.3933 | Learning Rate: 0.010000
140,000/ 200,000 | Loss: 1.6565 | Learning Rate: 0.010000
150,000/ 200,000 | Loss: 1.1850 | Learning Rate: 0.010000
160,000/ 200,000 | Loss: 1.1128 | Learning Rate: 0.010000
170,000/ 200,000 | Loss: 1.1768 | Learning Rate: 0.010000
180,000/ 200,000 | Loss: 0.8696 | Learning Rate: 0.010000
190,000/ 200,000 | Loss: 1.2677 | Learning Rate: 0.010000
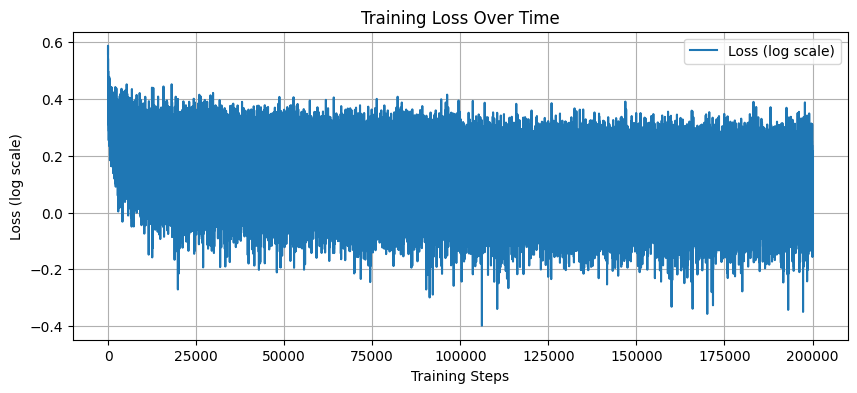
The training logs show that during the initial batches, the loss is now lower than before. The optimization of the model initialization allowed us to leverage the first training steps to learn valuable signal instead of asking the model to compensate for the bad initialization.
def plot_loss(lossi):
import matplotlib.pyplot as plt
plt.figure(figsize=(10, 4))
plt.plot(lossi, label='Loss (log scale)')
plt.xlabel('Training Steps')
plt.ylabel('Loss (log scale)')
plt.title('Training Loss Over Time')
plt.legend()
plt.grid()
plt.show()
plot_loss(lossi)
@torch.no_grad()
def split_loss(split, params, use_batch_norm=False):
"""
Compute the loss for a given split of the data.
Args:
split (str): The split to compute the loss for.
params (list): The model parameters.
use_batch_norm (bool): Whether to use batch normalization.
"""
x, y = {
"train": (X_train, Y_train),
"dev": (X_dev, Y_dev),
"test": (X_test, Y_test)
}[split]
logits = forward(params, x, use_batch_norm)
loss = F.cross_entropy(logits, y) # compute the cross-entropy loss
print(f"{split.capitalize()} Loss: {loss.item():.4f}")
split_loss("train", params)
split_loss("dev", params)
Train Loss: 1.3603
Dev Loss: 1.4285
import re
def clean_name(name: str) -> str:
# remove trailing "."
name = name.rstrip(".")
# replace "_s(_|$)" with "'s"
name = re.sub(r"_s$", "'s", name)
name = re.sub(r"_s_", "'s ", name)
# replace "_" with " "
name = name.replace("_", " ")
# title each word
name = " ".join(word.title() if len(word) > 1 else word for word in name.split())
# replace "'S" with "'s"
name = name.replace("'S", "'s")
return name
def generate_names(params, n_names=10, use_batch_norm=False):
"""
Generate new bird names using the trained model.
Args:
params (list[torch.Tensor]): List of model parameters including embeddings, weights, and biases.
n_names (int): Number of names to generate. Default is 10.
Returns:
None
"""
# sample new bird names from the model
g = torch.Generator().manual_seed(56789)
print("Generating new bird names:")
for _ in range(n_names):
context = [0] * CONTEXT_SIZE
out = []
while True:
# Convert context to tensor and get embeddings
context_tensor = torch.tensor(context, dtype=torch.int64).unsqueeze(0) # shape (1, CONTEXT_SIZE)
logits = forward(params, context_tensor, use_batch_norm)
probs = F.softmax(logits, dim=1) # shape (1, n_token)
# Sample from the distribution
ix = torch.multinomial(probs, num_samples=1, generator=g).item() # Get the index of the sampled token
out.append(index_to_token[ix]) # Append the token to the output
if ix == token_to_index[SPECIAL_TOKEN]: # Stop if we hit the special token
break
# Update the context by shifting it and adding the new index
context = context[1:] + [ix]
print(" "+"".join(clean_name("".join(out)))) # Print the generated bird name
generate_names(params, n_names=10)
Generating new bird names:
Crypa Carch
Benao Tochrees Spanes's Oophawk
Rufous Reepos Paraked Nech Kithtin
White Hern Stal's Flycatcheek
Blue Phennellowbler
Visa
White Eye
Chern Dove
Pindigeon
Sticolla
PyTorch Implementation
In this section, we PyTorch-ify our code. The goal is to transition from our DIY implementation to a more robust and efficient one that is more similar to the available classes and functions in PyTorch.
g = torch.Generator().manual_seed(56789)
class Linear:
def __init__(self, fan_in, fan_out, bias=True, generator=g):
self.weight = torch.randn(fan_in, fan_out, generator=generator) / fan_in ** 0.5
self.bias = torch.zeros(fan_out) if bias else None
def __call__(self, x):
self.out = x @ self.weight
if self.bias is not None:
self.out += self.bias
return self.out
def parameters(self):
return [self.weight] + ([] if self.bias is None else [self.bias])
class BatchNorm1d:
def __init__(self, dim, eps=1e-5, momentum=0.1):
self.momentum = momentum
self.eps = eps
self.training = True
# parameters trained with backprop
self.gamma = torch.ones(dim)
self.beta = torch.zeros(dim)
# buffers trained with momentum
self.running_mean = torch.zeros(dim)
self.running_var = torch.ones(dim)
def __call__(self, x):
if self.training:
xmean = x.mean(0, keepdim=True) # shape (1, dim)
xvar = x.var(0, keepdim=True, unbiased=True) # shape (1, dim)
else:
xmean = self.running_mean
xvar = self.running_var
xhat = (x - xmean) / torch.sqrt(xvar + self.eps)
self.out = self.gamma * xhat + self.beta
if self.training:
with torch.no_grad():
self.running_mean = (1 - self.momentum) * self.running_mean + self.momentum * xmean
self.running_var = (1 - self.momentum) * self.running_var + self.momentum * xvar
return self.out
def parameters(self):
return [self.gamma, self.beta]
class Tanh:
def __call__(self, x):
self.out = torch.tanh(x)
return self.out
def parameters(self):
return []
n_emb = 10
n_hidden = 100
vocab_size = len(token_to_index)
# model initialization
C = torch.randn((vocab_size, n_emb), generator=g)
layers = [
Linear(n_emb * CONTEXT_SIZE, n_hidden), BatchNorm1d(n_hidden), Tanh(),
Linear(n_hidden, n_hidden), BatchNorm1d(n_hidden), Tanh(),
Linear(n_hidden, n_hidden), BatchNorm1d(n_hidden), Tanh(),
Linear(n_hidden, n_hidden), BatchNorm1d(n_hidden), Tanh(),
Linear(n_hidden, n_hidden), BatchNorm1d(n_hidden), Tanh(),
Linear(n_hidden, vocab_size)
]
with torch.no_grad():
# shrink confidence of last layer
layers[-1].weight *= 0.1
# apply tanh gain to other layers
for layer in layers[:-1]:
if isinstance(layer, Linear):
layer.weight *= 5/3
parameters = [C] + [p for layer in layers for p in layer.parameters()]
# display number of total parameters
print(f"Total number of parameters: {sum(p.nelement() for p in parameters):,}")
for p in parameters:
p.requires_grad = True
Total number of parameters: 47,719
# training parameters
max_steps = 200_000
BATCH_SIZE = 32
loss_i = []
ud = []
# training block
for i in range(max_steps):
# construct the minibatch
idx = torch.randint(low=0, high=X_train.shape[0], size=(BATCH_SIZE,), generator=g)
Xb, Yb = X_train[idx], Y_train[idx]
# forward pass
emb = C[Xb] # shape (BATCH_SIZE, CONTEXT_SIZE, N_EMBEDDINGS)
x = emb.view(emb.shape[0], -1) # shape (BATCH_SIZE, CONTEXT_SIZE * N_EMBEDDINGS)
for layer in layers:
x = layer(x)
# compute the loss
loss = F.cross_entropy(x, Yb)
# backward pass
for layer in layers:
layer.out.retain_grad()
for p in parameters:
p.grad = None
loss.backward()
# update
lr = 0.075 if i < 100_000 else 0.01
for p in parameters:
p.data -= p.grad * lr
# log tracking
if i % 10_000 == 0:
print(f"{i:8,d}/{max_steps:8,d} | Loss: {loss.item():.4f} | Learning Rate: {lr:.6f}")
lossi.append(loss.log10().item())
with torch.no_grad():
ud.append(
[(lr * p.grad.std() / p.data.std()).log10().item() for p in parameters]
)
if i == 1_000:
break
0/ 200,000 | Loss: 3.3723 | Learning Rate: 0.075000
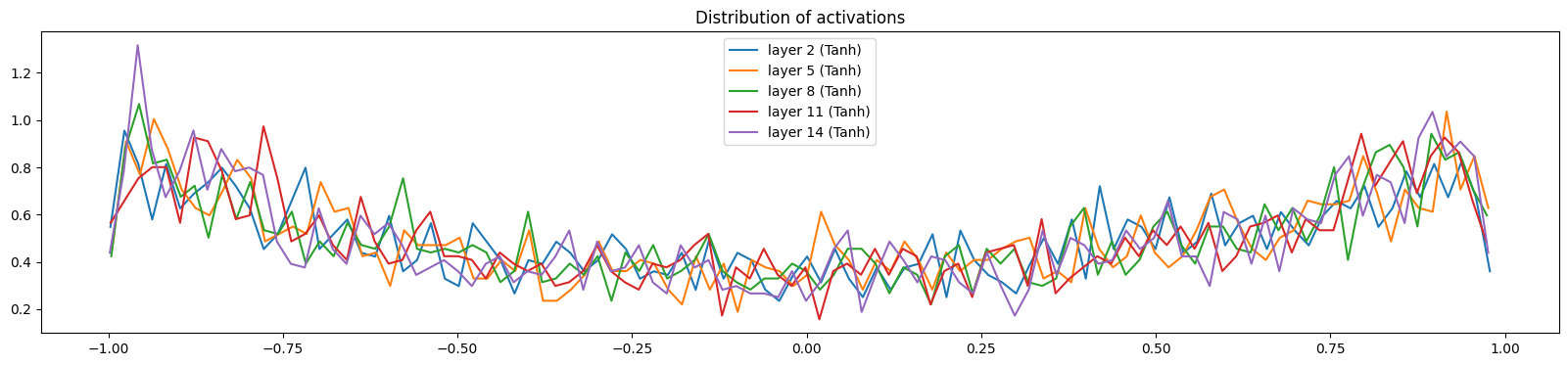
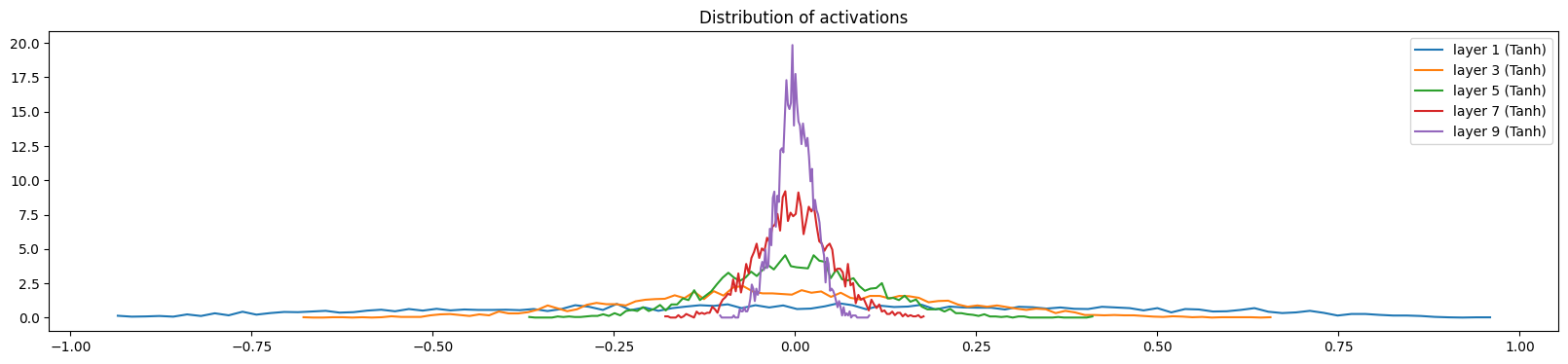
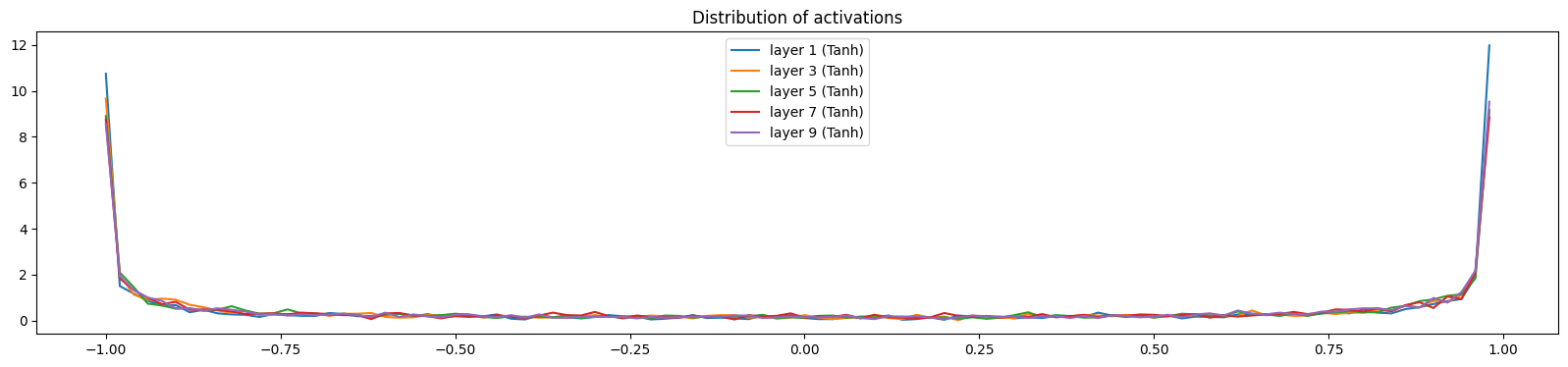
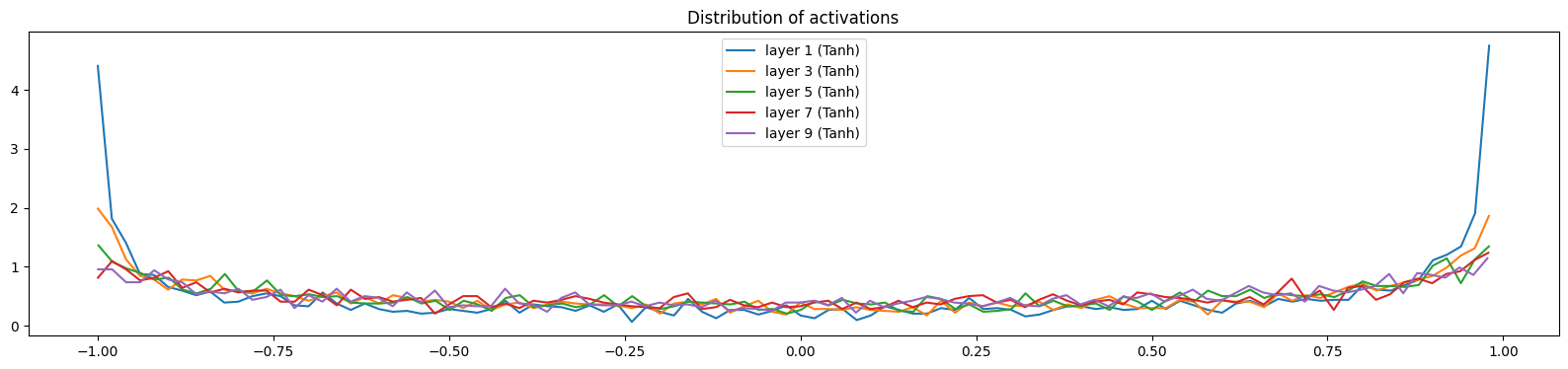
# visualize the content of the hidden layers
plt.figure(figsize=(20, 4))
legends = []
for i, layer in enumerate(layers[:-1]):
if isinstance(layer, Tanh):
t = layer.out
print("layer %d (%10s): mean %+.2f, std %.2f, saturated: %2.2f%%" % (i, layer.__class__.__name__, t.mean(), t.std(), (t > 0.97).float().mean() * 100.))
hy, hx = torch.histogram(t, density=True)
plt.plot(hx[:-1].detach().numpy(), hy.detach().numpy())
legends.append(f"layer {i} ({layer.__class__.__name__})")
plt.legend(legends)
plt.title("Distribution of activations")
plt.show()
layer 2 ( Tanh): mean +0.00, std 0.63, saturated: 1.25%
layer 5 ( Tanh): mean +0.01, std 0.64, saturated: 1.69%
layer 8 ( Tanh): mean +0.01, std 0.64, saturated: 1.53%
layer 11 ( Tanh): mean +0.00, std 0.64, saturated: 1.03%
layer 14 ( Tanh): mean +0.00, std 0.65, saturated: 1.28%
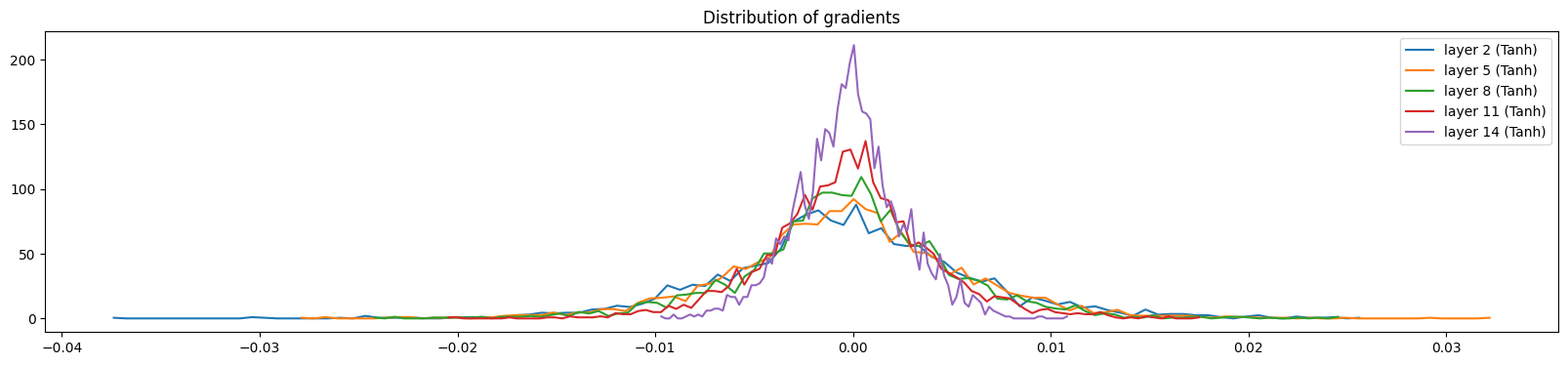
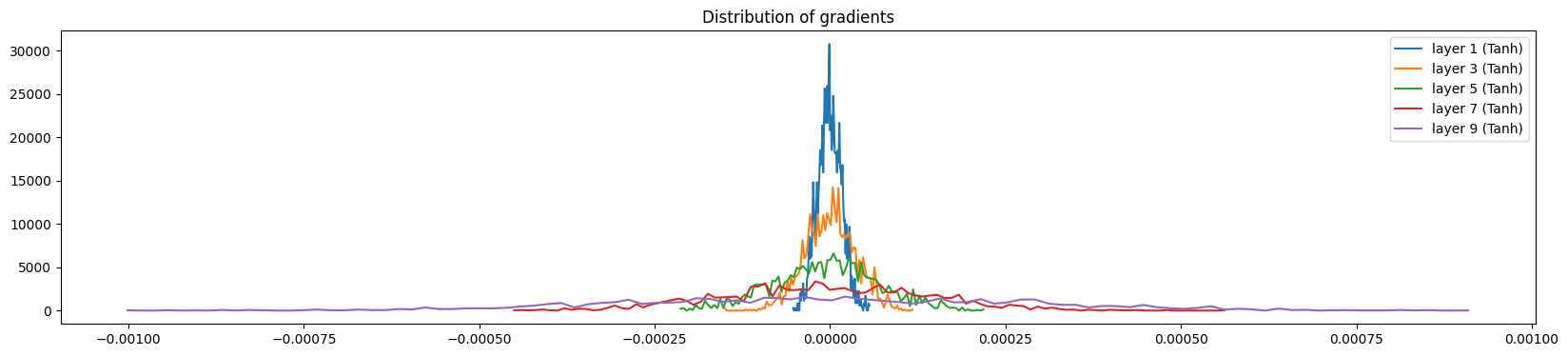
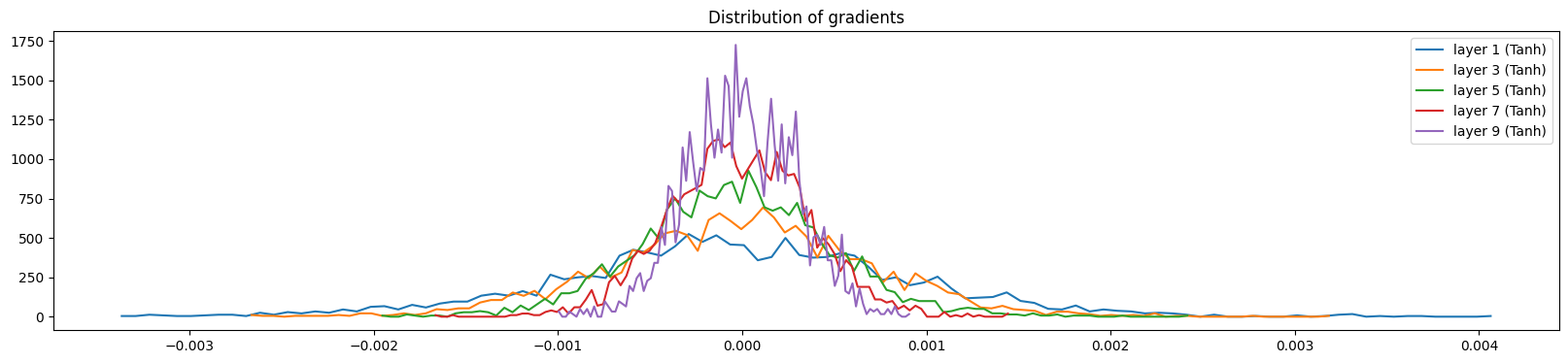
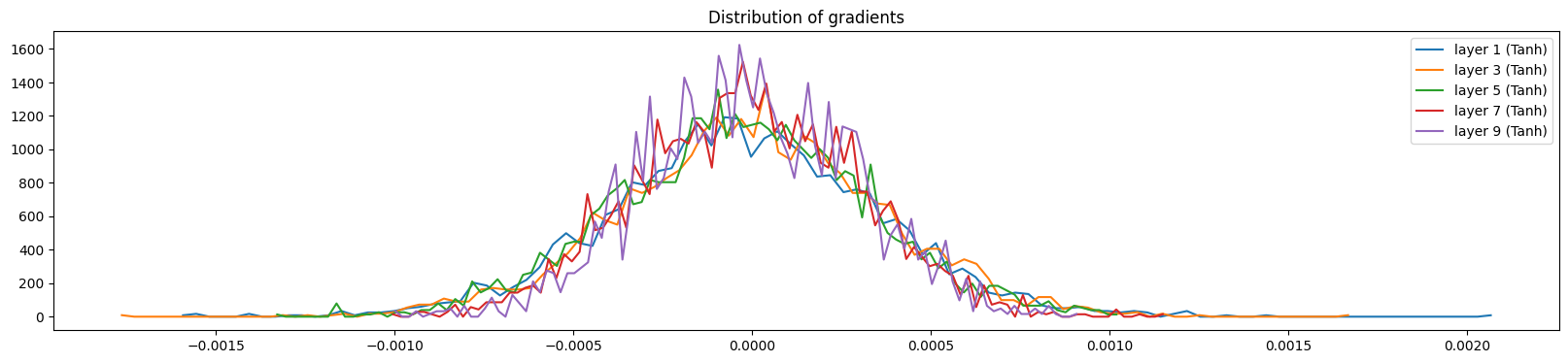
# visualize the content of the hidden layer gradients
plt.figure(figsize=(20, 4))
legends = []
for i, layer in enumerate(layers[:-1]):
if isinstance(layer, Tanh):
t = layer.out.grad
print("layer %d (%10s): mean %+f, std %e" % (i, layer.__class__.__name__, t.mean(), t.std()))
hy, hx = torch.histogram(t, density=True)
plt.plot(hx[:-1].detach().numpy(), hy.detach().numpy())
legends.append(f"layer {i} ({layer.__class__.__name__})")
plt.legend(legends)
plt.title("Distribution of gradients")
plt.show()
layer 2 ( Tanh): mean -0.000000, std 6.377883e-03
layer 5 ( Tanh): mean +0.000000, std 5.900440e-03
layer 8 ( Tanh): mean +0.000000, std 5.201767e-03
layer 11 ( Tanh): mean -0.000000, std 4.114801e-03
layer 14 ( Tanh): mean -0.000086, std 2.648591e-03
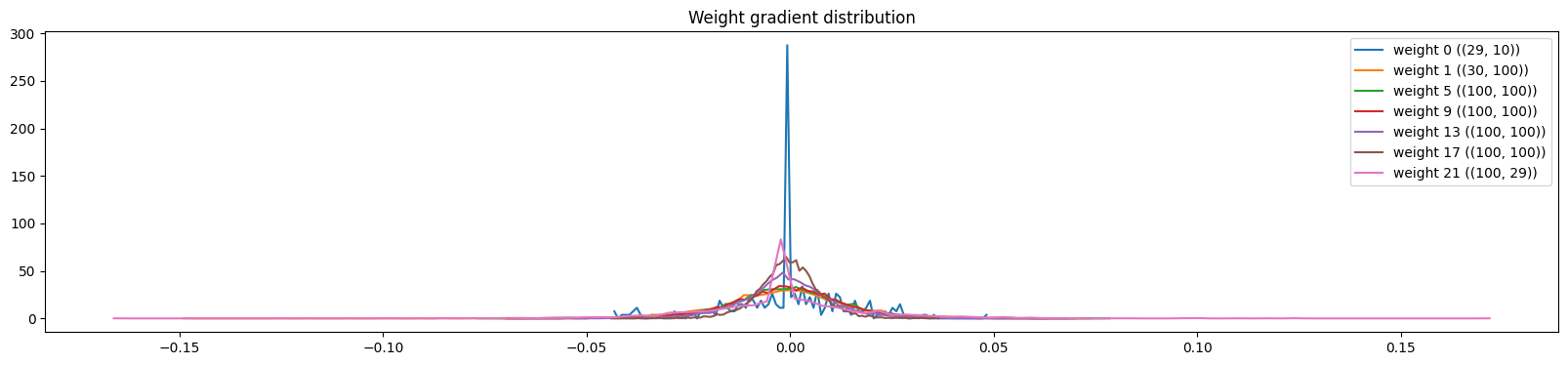
# visualize the content of the spread of the data over the spread of the gradient
plt.figure(figsize=(20, 4))
legends = []
for i, p in enumerate(parameters):
t = p.grad
if p.ndim == 2:
print('weight %10s | mean %+f | std %e | grad:data ratio %e' % (tuple(p.shape), t.mean(), t.std(), t.abs().mean() / p.abs().mean()))
hy, hx = torch.histogram(t, density=True)
plt.plot(hx[:-1].detach().numpy(), hy.detach().numpy())
legends.append(f"weight {i} ({tuple(p.shape)})")
plt.legend(legends)
plt.title("Weight gradient distribution")
plt.show()
weight (29, 10) | mean -0.000000 | std 1.450943e-02 | grad:data ratio 1.150493e-02
weight (30, 100) | mean -0.000040 | std 1.690887e-02 | grad:data ratio 5.191920e-02
weight (100, 100) | mean +0.000053 | std 1.450825e-02 | grad:data ratio 8.140352e-02
weight (100, 100) | mean -0.000119 | std 1.382819e-02 | grad:data ratio 7.950932e-02
weight (100, 100) | mean -0.000179 | std 1.160649e-02 | grad:data ratio 6.387087e-02
weight (100, 100) | mean +0.000064 | std 7.540221e-03 | grad:data ratio 4.275506e-02
weight (100, 29) | mean +0.000000 | std 2.084026e-02 | grad:data ratio 1.960166e-01
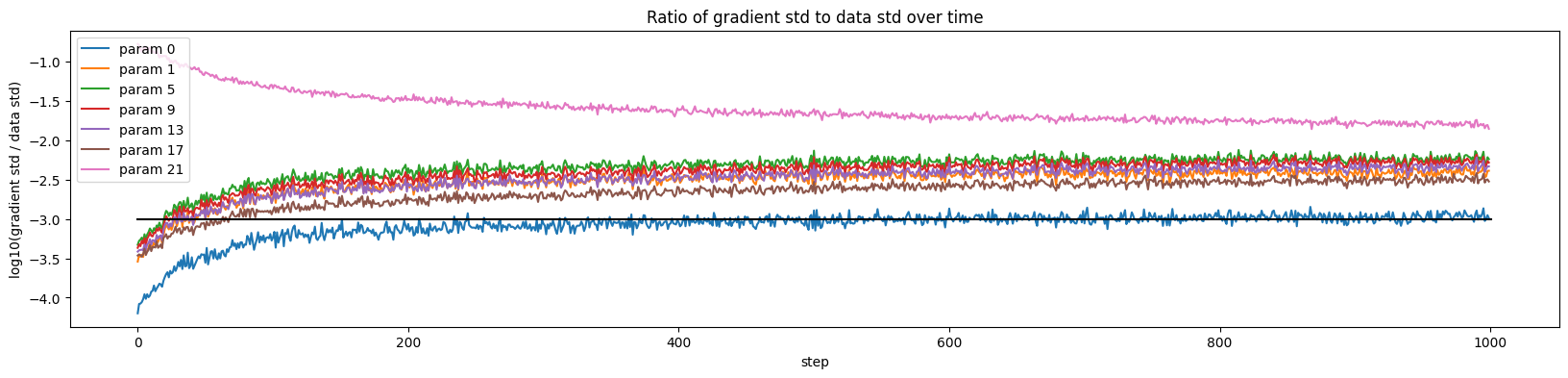
plt.figure(figsize=(20, 4))
legends = []
for i, p in enumerate(parameters):
if p.ndim == 2:
plt.plot([ud[j][i] for j in range(min(1000, len(ud)))])
legends.append('param %d' % i)
plt.plot([0, len(ud)], [-3, -3], 'k') # these ratios should be ~1e-3, indicate on plot
plt.legend(legends)
plt.xlabel("step")
plt.ylabel("log10(gradient std / data std)")
plt.title("Ratio of gradient std to data std over time");
Below, we visualize the distribution of activations and gradients of the hidden layers for a correction factor of 0.5 (versus the recommended 5/3 for tanh) and without using batch normalization. We see that the activations are slowly condensing toward 0, while the gradients are expanding. This asymmetry is a problem because it means that the deeper layers aren’t evenly activated, as most activations tend to be closer to 0.
Below, we visualize the distribution of activations and gradients of the hidden layers for a correction factor of 3.0 (versus the recommended 5/3 for tanh) and without using batch normalization. We see that the layers are saturated (i.e., most of the activations are close to -1 or 1) and the gradients are close to 0. This is a problem because it puts the model in a locked state where it cannot efficiently learn.
Below, we visualize the distribution of activations and gradients of the hidden layers for a correction factor of 5/3 (versus the recommended 5/3 for tanh) and without using batch normalization. The gradient distribution of all the different layers depicts a similar normal distribution. In addition, the gradient distributions have very similar standard deviations, showing that the gradients aren’t shrinking or expanding.
Key Takeaways and Best Practices
1. Output Layer Initialization
- Problem: Large output weights create overconfident predictions
- Solution: Scale output weights by 0.1 and zero out biases
- Result: Initial loss close to random baseline
2. Hidden Layer Initialization
- Problem: Random initialization leads to vanishing/exploding gradients
- Solution: Use Xavier/Glorot initialization: \(\sigma_W = \frac{1}{\sqrt{n_{in}}}\)
- For tanh: Apply additional gain factor of \(\frac{5}{3}\)
3. Batch Normalization
- Benefits: Stabilizes training, allows higher learning rates
- Implementation: Normalize activations, then apply learnable scale and shift
- Trade-offs: Adds computational overhead but significantly improves training
4. Monitoring Training Health
- Activation distributions: Should be well-spread, not saturated
- Gradient distributions: Should be similar across layers
- Loss curves: Should decrease smoothly without oscillations
Practical Recommendations
When to Use Each Technique:
- Xavier/Glorot Initialization: Always use for feedforward networks
- Output Layer Scaling: Essential for classification tasks
- Batch Normalization: Use for deep networks (>3 layers) or when training is unstable
- Activation-Specific Gains:
- Tanh: Use gain of \(\frac{5}{3}\)
- ReLU: Use gain of \(\sqrt{2}\) (He initialization)
Conclusion
Proper weight initialization is not just a technical detail—it’s fundamental to successful neural network training. By understanding the mathematical principles behind initialization strategies and implementing them systematically, we can:
- Start training from a reasonable baseline rather than fighting against poor initialization
- Achieve faster convergence with more stable gradients
- Train deeper networks without vanishing/exploding gradient problems
- Improve model robustness and generalization
The techniques we’ve explored—output layer scaling, Xavier initialization, and batch normalization—form the foundation of modern deep learning architectures. While frameworks like PyTorch and TensorFlow implement these automatically, understanding the underlying principles helps us make informed decisions about model architecture and training strategies.
In the next part of this series, we’ll explore more advanced techniques like residual connections, attention mechanisms, and modern architectures that build upon these fundamental principles.